TensorFlow常用模組¶
前置知識
Python的序列化模組Pickle (非必須)
Python的特殊函數參數**kwargs (非必須)
tf.train.Checkpoint :變數的保存與還原¶
警告
Checkpoint只保存模型的參數,不保存模型的計算過程,因此一般用於在具有模型程式源碼的時候還原之前訓練好的模型參數。如果需要導出模型(無需程式源程式碼也能運行模型),請參考 “部署”章節中的SavedModel 。
很多時候,我們希望在模型訓練完成後能將訓練好的參數(變數)保存起來。在需要使用模型的其他地方載入模型和參數,就能直接得到訓練好的模型。可能你第一個想到的是用Python的序列化模組 pickle 存儲 model.variables。但不幸的是,TensorFlow的變數類型 ResourceVariable 並不能被序列化。
好在TensorFlow提供了 tf.train.Checkpoint 這一強大的變量保存與還原類別,可以使用其 save() 和 restore() 方法將TensorFlow中所有包含Checkpointable State的對象進行保存和還原類別。具體而言,tf.keras.optimizer 、 tf.Variable 、 tf.keras.Layer 或者 tf.keras.Model 實例都可以被保存。其使用方法非常簡單,我們首先宣告一個Checkpoint:
checkpoint = tf.train.Checkpoint(model=model)
這裡 tf.train.Checkpoint() 接受的初始化參數比較特殊,是一個 **kwargs 。具體而言,是一系列的鍵值對,鍵名可以隨意取,值為需要保存的對象。例如,如果我們希望保存一個繼承 tf.keras.Model 的模型實例 model 和一個繼承 tf.train.Optimizer 的優化器 optimizer ,我們可以這樣寫:
checkpoint = tf.train.Checkpoint(myAwesomeModel=model, myAwesomeOptimizer=optimizer)
這裡 myAwesomeModel 是我們為待保存的模型 model 所取的任意鍵名。注意,在還原變數的時候,我們還將使用這一鍵名。
接下來,當模型訓練完成需要保存的時候,使用:
checkpoint.save(save_path_with_prefix)
就可以。 save_path_with_prefix 是保存文件的目錄+前綴。
注解
例如,在當前程式碼目錄建立一個名為save的文件夾並呼叫一次 checkpoint.save('./save/model.ckpt') ,我們就可以在可以在save目錄下發現名為 checkpoint 、 model.ckpt-1.index 、 model.ckpt-1.data-00000-of-00001 的三個文件,這些文件就記錄了變數資訊。checkpoint.save() 方法可以運行多次,每運行一次都會得到一個.index文件和.data文件,序號依次累加。
當在其他地方需要為模型重新載入之前保存的參數時,需要再次實例化一個checkpoint,同時保持鍵名的一致。再調用checkpoint的restore方法。就像下面這樣:
model_to_be_restored = MyModel() # 待還原參數的同一模型
checkpoint = tf.train.Checkpoint(myAwesomeModel=model_to_be_restored) # 鍵名保持為“myAwesomeModel”
checkpoint.restore(save_path_with_prefix_and_index)
即可還原模型變數。 save_path_with_prefix_and_index 是之前保存的文件的目錄+前綴+編號。例如,呼叫 checkpoint.restore('./save/model.ckpt-1') 就可以載入前綴為 model.ckpt ,序號為1的文件來還原模型。
當保存了多個文件時,我們往往想載入最近的一個。可以使用 tf.train.latest_checkpoint(save_path) 這個輔助函數返回目錄下最近一次checkpoint的文件名。例如如果save目錄下有 model.ckpt-1.index 到 model.ckpt-10.index 的10個保存文件, tf.train.latest_checkpoint('./save') 即返回 ./save/model.ckpt-10 。
總體而言,還原與保存變量的典型程式碼框架如下:
# train.py 模型訓練階段
model = MyModel()
# 實例化Checkpoint,指定保存對象為model(如果需要保存Optimizer的參數也可加入)
checkpoint = tf.train.Checkpoint(myModel=model)
# ...(模型訓練程式碼)
# 模型訓練完畢後將參數保存到文件(也可以在模型訓練過程中每隔一段時間就保存一次)
checkpoint.save('./save/model.ckpt')
# test.py 模型使用階段
model = MyModel()
checkpoint = tf.train.Checkpoint(myModel=model) # 實例化Checkpoint,指定還原對象為model
checkpoint.restore(tf.train.latest_checkpoint('./save')) # 從文件還原模型參數
# 模型使用程式碼
注解
tf.train.Checkpoint 與以前版本常用的 tf.train.Saver 相比,強大之處在於其支援在即時執行模式下“延遲”還原變數。具體而言,當呼叫了 checkpoint.restore() ,但模型中的變數還沒有被建立的時候,Checkpoint可以等到變量被建立的時候再進行數值的還原。即時執行模式下,模型中各個層的初始化和變數的建立是在模型第一次被呼叫的時候才進行的(好處在於可以根據輸入的張量形狀而自動確定變量形狀,無需手動指定)。這意味著當模型剛剛被實例化的時候,其實裡面還一個變數都沒有,這時候使用以往的方式去還原變數數值是一定會報錯的。比如,你可以試試在train.py呼叫 tf.keras.Model 的 save_weight() 方法保存model的參數,並在test.py中實例化model後立即調用 load_weight() 方法,就會出錯,只有當呼叫了一遍model之後再運行 load_weight() 方法才能得到正確的結果。可見, tf.train.Checkpoint 在這種情況下可以給我們帶來相當大的便利。另外, tf.train.Checkpoint 同時也支持圖執行模式。
最後提供一個實例,以前章的 多層感知器模型 為例展示模型變數的保存和載入:
import tensorflow as tf
import numpy as np
import argparse
from zh.model.mnist.mlp import MLP
from zh.model.utils import MNISTLoader
parser = argparse.ArgumentParser(description='Process some integers.')
parser.add_argument('--mode', default='train', help='train or test')
parser.add_argument('--num_epochs', default=1)
parser.add_argument('--batch_size', default=50)
parser.add_argument('--learning_rate', default=0.001)
args = parser.parse_args()
data_loader = MNISTLoader()
def train():
model = MLP()
optimizer = tf.keras.optimizers.Adam(learning_rate=args.learning_rate)
num_batches = int(data_loader.num_train_data // args.batch_size * args.num_epochs)
checkpoint = tf.train.Checkpoint(myAwesomeModel=model) # 實例化Checkpoint,設置儲存對象為model
for batch_index in range(1, num_batches+1):
X, y = data_loader.get_batch(args.batch_size)
with tf.GradientTape() as tape:
y_pred = model(X)
loss = tf.keras.losses.sparse_categorical_crossentropy(y_true=y, y_pred=y_pred)
loss = tf.reduce_mean(loss)
print("batch %d: loss %f" % (batch_index, loss.numpy()))
grads = tape.gradient(loss, model.variables)
optimizer.apply_gradients(grads_and_vars=zip(grads, model.variables))
if batch_index % 100 == 0: # 每隔100個Batch儲存一次
path = checkpoint.save('./save/model.ckpt') # 儲存模型參數到文件
print("model saved to %s" % path)
def test():
model_to_be_restored = MLP()
# 實例化Checkpoint,設置還原對象為新建立的模型model_to_be_restored
checkpoint = tf.train.Checkpoint(myAwesomeModel=model_to_be_restored)
checkpoint.restore(tf.train.latest_checkpoint('./save')) # 從文件還原模型參數
y_pred = np.argmax(model_to_be_restored.predict(data_loader.test_data), axis=-1)
print("test accuracy: %f" % (sum(y_pred == data_loader.test_label) / data_loader.num_test_data))
if __name__ == '__main__':
if args.mode == 'train':
train()
if args.mode == 'test':
test()
在程式碼目錄下建立save資料夾並運行程式碼進行訓練後,save文件夾內將會存放每隔100個batch保存一次的模型變數資料。在命令行參數中加入 --mode=test 並再次運行程式碼,將直接使用最後一次保存的變數值還原模型並在測試集上測試模型性能,可以直接獲得95%左右的準確率。
使用 tf.train.CheckpointManager 刪除舊的Checkpoint以及自定義文件編號
在模型的訓練過程中,我們往往每隔一定步數保存一個Checkpoint並進行編號。不過很多時候我們會有這樣的需求:
在長時間的訓練後,程式會保存大量的Checkpoint,但我們只想保留最後的幾個Checkpoint;
Checkpoint預設從1開始編號,每次累加1,但我們可能希望使用別的編號方式(例如使用當前Batch的編號作為文件編號)。
這時,我們可以使用TensorFlow的 tf.train.CheckpointManager 來實現以上需求。具體而言,在定義Checkpoint後接著定義一個CheckpointManager:
checkpoint = tf.train.Checkpoint(model=model)
manager = tf.train.CheckpointManager(checkpoint, directory='./save', checkpoint_name='model.ckpt', max_to_keep=k)
此處, directory 參數為文件保存的路徑, checkpoint_name 為文件名前綴(不提供則預設為 ckpt ), max_to_keep 為保留的Checkpoint數目。
在需要保存模型的時候,我們直接使用 manager.save() 即可。如果我們希望自行指定保存的Checkpoint的編號,則可以在保存時加入 checkpoint_number 參數。例如 manager.save(checkpoint_number=100) 。
以下提供一個實例,展示使用CheckpointManager限制僅保留最後三個Checkpoint文件,並使用batch的編號作為Checkpoint的文件編號。
import tensorflow as tf
import numpy as np
import argparse
from zh.model.mnist.mlp import MLP
from zh.model.utils import MNISTLoader
parser = argparse.ArgumentParser(description='Process some integers.')
parser.add_argument('--mode', default='train', help='train or test')
parser.add_argument('--num_epochs', default=1)
parser.add_argument('--batch_size', default=50)
parser.add_argument('--learning_rate', default=0.001)
args = parser.parse_args()
data_loader = MNISTLoader()
def train():
model = MLP()
optimizer = tf.keras.optimizers.Adam(learning_rate=args.learning_rate)
num_batches = int(data_loader.num_train_data // args.batch_size * args.num_epochs)
checkpoint = tf.train.Checkpoint(myAwesomeModel=model)
# 使用tf.train.CheckpointManager管理Checkpoint
manager = tf.train.CheckpointManager(checkpoint, directory='./save', max_to_keep=3)
for batch_index in range(1, num_batches):
X, y = data_loader.get_batch(args.batch_size)
with tf.GradientTape() as tape:
y_pred = model(X)
loss = tf.keras.losses.sparse_categorical_crossentropy(y_true=y, y_pred=y_pred)
loss = tf.reduce_mean(loss)
print("batch %d: loss %f" % (batch_index, loss.numpy()))
grads = tape.gradient(loss, model.variables)
optimizer.apply_gradients(grads_and_vars=zip(grads, model.variables))
if batch_index % 100 == 0:
# 使用CheckpointManager保存模型參數到文件並自定義編號
path = manager.save(checkpoint_number=batch_index)
print("model saved to %s" % path)
def test():
model_to_be_restored = MLP()
checkpoint = tf.train.Checkpoint(myAwesomeModel=model_to_be_restored)
checkpoint.restore(tf.train.latest_checkpoint('./save'))
y_pred = np.argmax(model_to_be_restored.predict(data_loader.test_data), axis=-1)
print("test accuracy: %f" % (sum(y_pred == data_loader.test_label) / data_loader.num_test_data))
if __name__ == '__main__':
if args.mode == 'train':
train()
if args.mode == 'test':
test()
TensorBoard:訓練過程可視化¶
有時,你希望查看模型訓練過程中各個參數的變化情況(例如損失函數Loss的值)。雖然可以通過命令行輸出來查看,但有時顯得不夠直觀。而TensorBoard就是一個能夠幫助我們將訓練過程可視化的工具。
實時查看參數變化情況¶
首先在程式碼目錄下建立一個文件夾(如 ./tensorboard )存放TensorBoard的記錄文件,並在程式碼中實例化一個記錄器:
summary_writer = tf.summary.create_file_writer('./tensorboard') # 參數為記錄文件所保存的目錄
接下來,當需要記錄訓練過程中的參數時,通過with語句指定希望使用的記錄器,並對需要記錄的參數(一般是scalar)運行 tf.summary.scalar(name, tensor, step=batch_index) ,即可將訓練過程中參數在step時候的值記錄下來。這裡的step參數可根據自己的需要自行訂製,一般可設置為當前訓練過程中的batch序號。整體框架如下:
summary_writer = tf.summary.create_file_writer('./tensorboard')
# 開始模型訓練
for batch_index in range(num_batches):
# ...(訓練程式碼,當前batch的損失值放入變量loss中)
with summary_writer.as_default(): # 希望使用的記錄器
tf.summary.scalar("loss", loss, step=batch_index)
tf.summary.scalar("MyScalar", my_scalar, step=batch_index) # 還可以添加其他自定義的變數
每運行一次 tf.summary.scalar() ,記錄器就會向記錄文件中寫入一條記錄。除了最簡單的純量(scalar)以外,TensorBoard還可以對其他類型的資料(如圖片,音頻等)進行可視化,詳見 TensorBoard文件 。
當我們要對訓練過程可視化時,在程式碼目錄打開終端(如需要的話進入TensorFlow的conda環境),運行:
tensorboard --logdir=./tensorboard
然後使用瀏覽器訪問命令行程式所輸出的網址(一般是http://name-of-your-computer:6006),即可訪問TensorBoard的可視界面,如下圖所示:
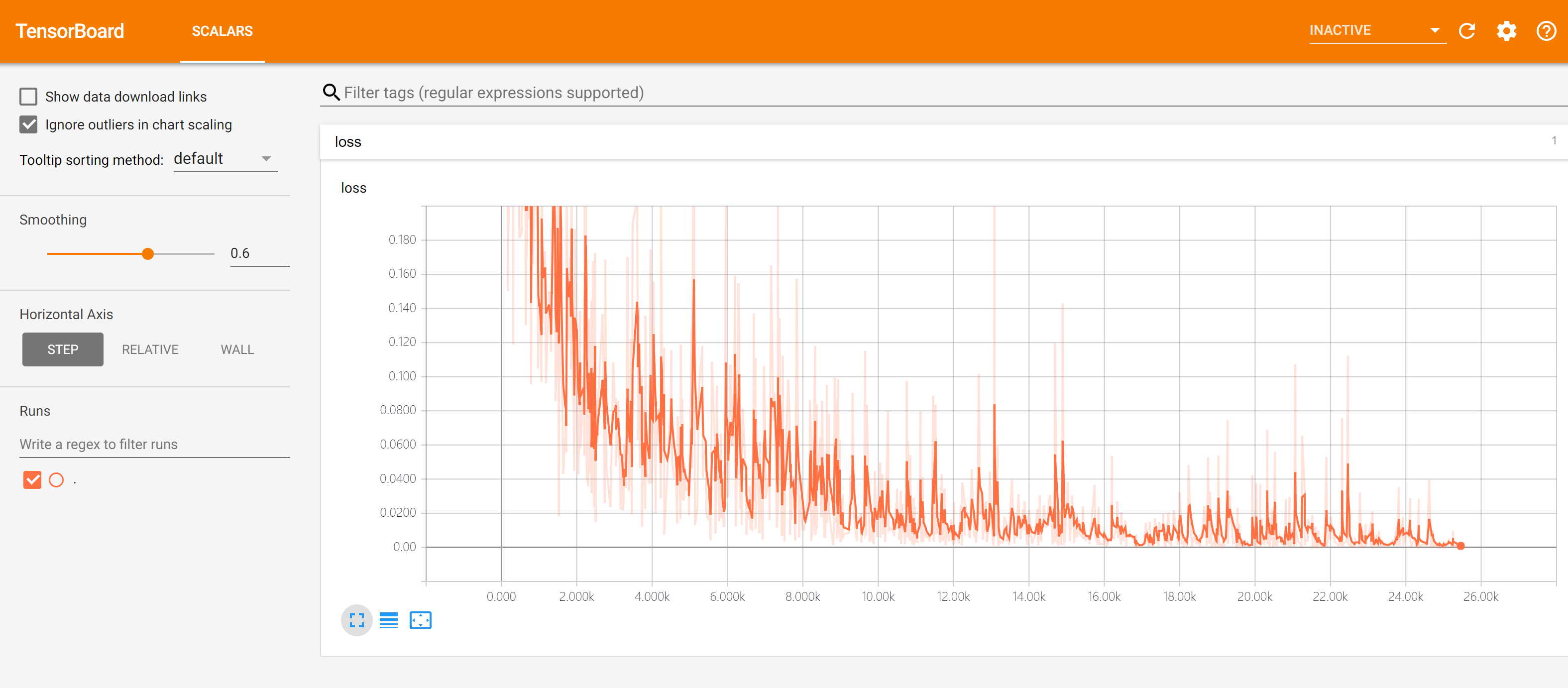
預設情況下,TensorBoard每30秒更新一次資料。不過也可以點擊右上角的刷新按鈕手動刷新。
TensorBoard的使用有以下注意事項:
如果需要重新訓練,需要刪除掉記錄資料夾內的資訊並重啟TensorBoard(或者建立一個新的記錄資料夾並開啟TensorBoard,
--logdir參數設置為新建立的文件夾);記錄資料夾目錄保持全英文。
查看Graph和Profile信息¶
除此以外,我們可以在訓練時使用 tf.summary.trace_on 開啟Trace,此時TensorFlow會將訓練時的大量資訊(如計算圖的結構,每個操作所耗費的時間等)記錄下來。在訓練完成後,使用 tf.summary.trace_export 將記錄結果輸出到文件。
tf.summary.trace_on(graph=True, profiler=True) # 開啟Trace,可以記錄圖結構和profile資訊
# 進行訓練
with summary_writer.as_default():
tf.summary.trace_export(name="model_trace", step=0, profiler_outdir=log_dir) # 保存Trace資訊到文件
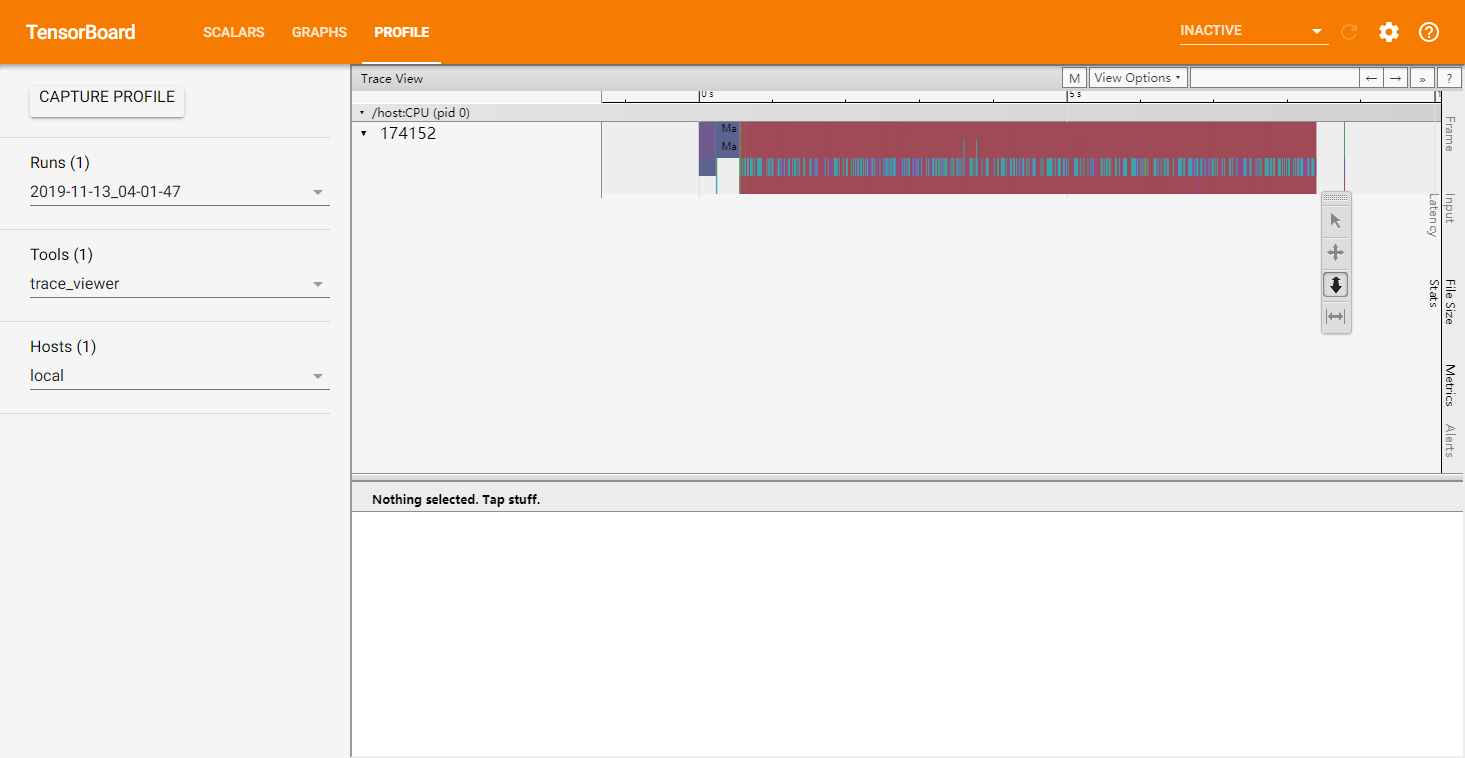
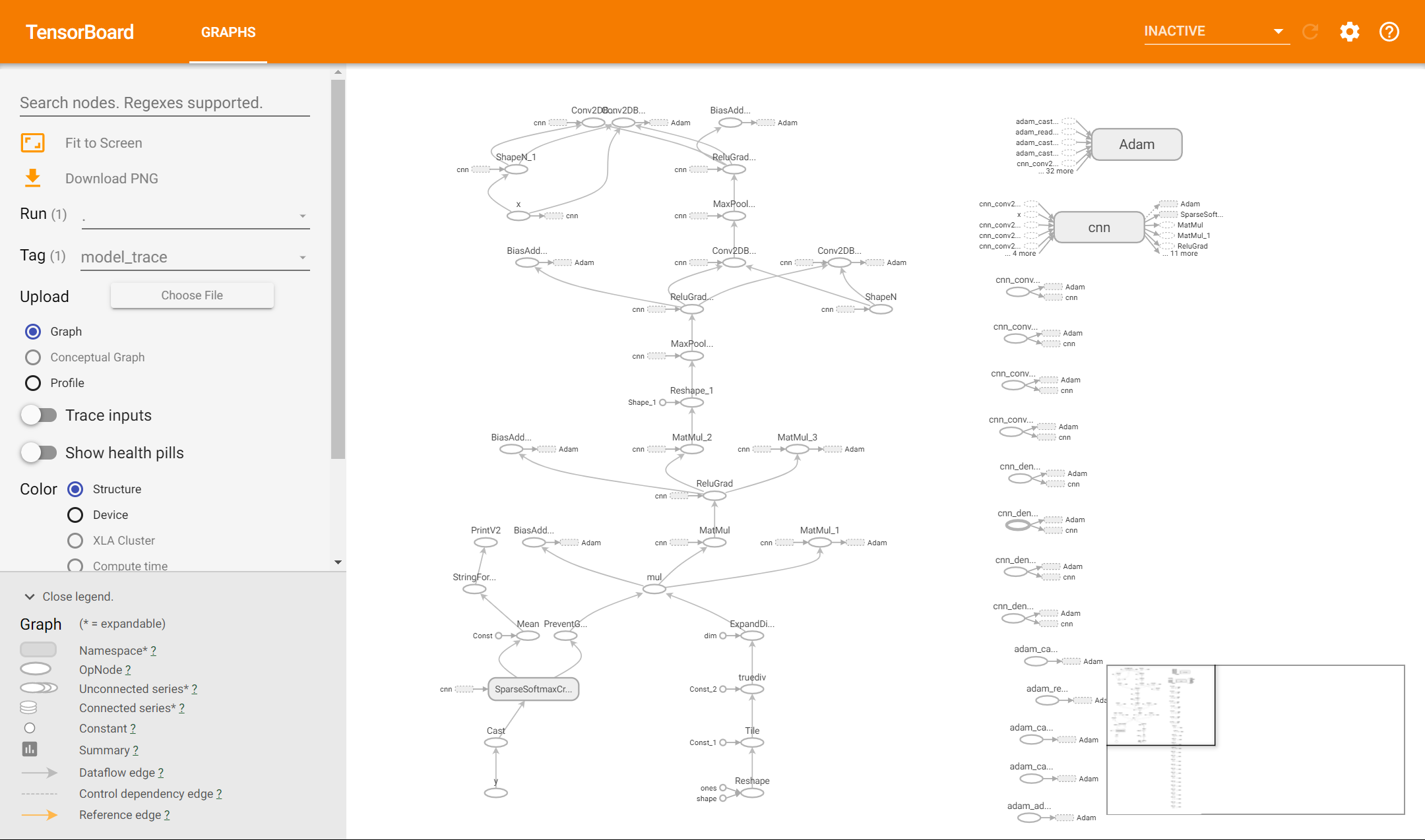
之後,我們就可以在TensorBoard中選擇“Profile”,以時間軸的方式查看各操作的所消耗時間情況。如果使用了 tf.function 建立了計算圖,也可以點擊“Graphs”查看圖結構。
實例:查看多層感知器模型的訓練情況¶
最後提供一個實例,以前章的 多層感知器模型 為例展示TensorBoard的使用:
import tensorflow as tf
from zh.model.mnist.mlp import MLP
from zh.model.utils import MNISTLoader
num_batches = 1000
batch_size = 50
learning_rate = 0.001
log_dir = 'tensorboard'
model = MLP()
data_loader = MNISTLoader()
optimizer = tf.keras.optimizers.Adam(learning_rate=learning_rate)
summary_writer = tf.summary.create_file_writer(log_dir) # 實例化記錄器
tf.summary.trace_on(profiler=True) # 開啟Trace(可選)
for batch_index in range(num_batches):
X, y = data_loader.get_batch(batch_size)
with tf.GradientTape() as tape:
y_pred = model(X)
loss = tf.keras.losses.sparse_categorical_crossentropy(y_true=y, y_pred=y_pred)
loss = tf.reduce_mean(loss)
print("batch %d: loss %f" % (batch_index, loss.numpy()))
with summary_writer.as_default(): # 指定記錄器
tf.summary.scalar("loss", loss, step=batch_index) # 將目前損失函數的值寫入記錄器
grads = tape.gradient(loss, model.variables)
optimizer.apply_gradients(grads_and_vars=zip(grads, model.variables))
with summary_writer.as_default():
tf.summary.trace_export(name="model_trace", step=0, profiler_outdir=log_dir) # 儲存Trace資料到文件(可選)
tf.data :資料集的建立與預處理¶
很多時候,我們希望使用自己的資料集來訓練模型。然而,面對一堆格式不一的原始資料文件,將其預處理並讀入程式的過程往往十分繁瑣,甚至比模型的設計還要耗費精力。比如,為了讀入一批圖片文件,我們可能需要糾結於python的各種圖片處理包(比如 pillow ),自己設計Batch的生成方式,最後還可能在運行的效率上不盡如人意。為此,TensorFlow提供了 tf.data 這一模組,包括了一套靈活的資料集建構API,能夠幫助我們快速、高效的建構資料輸入的管道,尤其適用於資料量巨大的情況下。
資料集對象的建立¶
tf.data 的核心是 tf.data.Dataset 類別,提供了對資料集的高層封裝。tf.data.Dataset 由一系列的可疊代訪問的元素(element)組成,每個元素包含一個或多個張量。比如說,對於一個由圖片組成的資料集,每個元素可以是一個形狀為 長×寬×通道數 的圖片張量,也可以是由圖片張量和圖片標籤張量組成的元組(Tuple)。
最基礎的建立 tf.data.Dataset 的方法是使用 tf.data.Dataset.from_tensor_slices() ,適用於資料量較小(能夠整個裝進內存)的情況。具體而言,如果我們的資料集中的所有元素通過張量的第0維,拼接成一個大的張量(例如,前節的MNIST資料集的訓練集即為一個 [60000, 28, 28, 1] 的張量,表示了60000張28*28的單通道灰階圖片),那麼我們提供一個這樣的張量或者第0維大小相同的多個張量作為輸入,即可按張量的第0維展開來建構資料集,資料集的元素數量為張量第0位的大小。具體範例如下:
import tensorflow as tf
import numpy as np
X = tf.constant([2013, 2014, 2015, 2016, 2017])
Y = tf.constant([12000, 14000, 15000, 16500, 17500])
# 也可以使用NumPy陣列,效果相同
# X = np.array([2013, 2014, 2015, 2016, 2017])
# Y = np.array([12000, 14000, 15000, 16500, 17500])
dataset = tf.data.Dataset.from_tensor_slices((X, Y))
for x, y in dataset:
print(x.numpy(), y.numpy())
輸出:
2013 12000
2014 14000
2015 15000
2016 16500
2017 17500
警告
當提供多個張量作為輸入時,張量的第0維大小必須相同,且必須將多個張量作為元組(Tuple,即使用Python中的小括號)拼接並作為輸入。
我們可以載入前章的MNIST資料集:
import matplotlib.pyplot as plt
(train_data, train_label), (_, _) = tf.keras.datasets.mnist.load_data()
train_data = np.expand_dims(train_data.astype(np.float32) / 255.0, axis=-1) # [60000, 28, 28, 1]
mnist_dataset = tf.data.Dataset.from_tensor_slices((train_data, train_label))
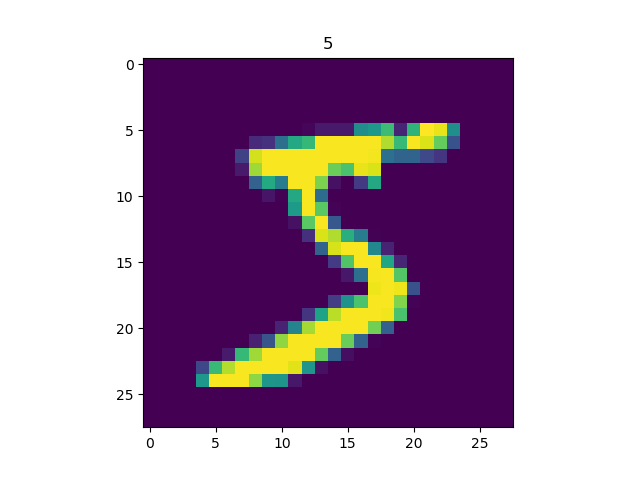
for image, label in mnist_dataset:
plt.title(label.numpy())
plt.imshow(image.numpy()[:, :, 0])
plt.show()
輸出
提示
TensorFlow Datasets提供了一個基於 tf.data.Datasets 立即使用的資料集集合,相關內容可參考 TensorFlow Datasets 。例如,使用以下語句:
import tensorflow_datasets as tfds
dataset = tfds.load("mnist", split=tfds.Split.TRAIN)
即可快速載入MNIST資料集。
對於特別巨大而無法完整載入內存的資料集,我們可以先將資料集處理為 TFRecord 格式,然後使用 tf.data.TFRocrdDataset() 進行載入。詳情請參考 後節:
資料集對象的預處理¶
tf.data.Dataset 類別為我們提供了多種資料集預處理方法。最常使用的如下:
Dataset.map(f):對資料集中的每個元素應用函數f,得到一個新的資料集(這部分往往結合tf.io進行讀寫和解碼文件,tf.image進行圖片處理);Dataset.shuffle(buffer_size):將資料集打亂(設定一個固定大小的緩衝區(Buffer),取出前buffer_size各元素放入,並從緩衝區中隨機採樣,取樣後的資料用後續資料替換);Dataset.batch(batch_size):將資料集分成批次,即對每batch_size個元素,使用tf.stack()在第0維合並,成為一個元素;
除此以外,還有 Dataset.repeat() (重複資料集的元素)、 Dataset.reduce() (與Map相對的聚合操作)、 Dataset.take() (截取資料集中的前若干個元素)等,可參考 API文件 進一步了解。
以下以MNIST資料集進行範例。
使用 Dataset.map() 將所有圖片旋轉90度:
def rot90(image, label):
image = tf.image.rot90(image)
return image, label
mnist_dataset = mnist_dataset.map(rot90)
for image, label in mnist_dataset:
plt.title(label.numpy())
plt.imshow(image.numpy()[:, :, 0])
plt.show()
輸出
使用 Dataset.batch() 將資料集劃分批次,每個批次的大小為4:
mnist_dataset = mnist_dataset.batch(4)
for images, labels in mnist_dataset: # image: [4, 28, 28, 1], labels: [4]
fig, axs = plt.subplots(1, 4)
for i in range(4):
axs[i].set_title(labels.numpy()[i])
axs[i].imshow(images.numpy()[i, :, :, 0])
plt.show()
輸出
使用 Dataset.shuffle() 將資料打散後再設置批次,緩衝區大小設置為10000:
mnist_dataset = mnist_dataset.shuffle(buffer_size=10000).batch(4)
for images, labels in mnist_dataset:
fig, axs = plt.subplots(1, 4)
for i in range(4):
axs[i].set_title(labels.numpy()[i])
axs[i].imshow(images.numpy()[i, :, :, 0])
plt.show()
輸出
第一次運行¶
第二次運行¶
可見每次的資料都會被隨機打散。
Dataset.shuffle() 時緩衝區大小 buffer_size 的設置
tf.data.Dataset 作為一個針對大規模資料設計的疊代器,本身無法方便地獲得自身元素的數量或隨機訪問元素。因此,為了高效且較為充分地打散資料集,需要一些特定的方法。Dataset.shuffle() 採取了以下方法:
設定一個固定大小為
buffer_size的緩衝區(Buffer);初始化時,取出資料集中的前
buffer_size個元素放入緩衝區;每次需要從資料集中取元素時,即從緩衝區中隨機採樣一個元素並取出,然後從後續的元素中取出一個放回到之前被取出的位置,以維持緩衝區的大小。
因此,緩衝區的大小需要根據資料集的特性和資料排列順序特點來進行合理的設置。比如:
當
buffer_size設置為1時,其實等價於沒有進行任何的資料打散;當資料集的標籤順序分佈極為不均勻(例如二元分類時資料集前N個的標籤為0,後N個的標籤為1)時,較小的緩衝區大小會使得訓練時取出的Batch資料很可能全為同一標籤,從而影響訓練效果。一般而言,資料集的順序分佈若較為隨機,則緩衝區的大小可較小,否則則需要設置較大的緩衝區。
使用 tf.data 的平行化策略提高訓練流程效率¶
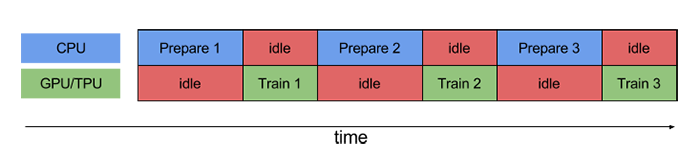
當訓練模型時,我們希望充分利用計算資源,減少CPU/GPU的空載時間。然而有時,資料集的準備處理非常耗時,使得我們在每進行一次訓練前都需要花費大量的時間準備待訓練的資料,而此時GPU只能空載而等待資料,造成了計算資源的浪費,如下圖所示:
此時, tf.data 的資料集對象為我們提供了 Dataset.prefetch() 方法,使得我們可以讓資料集對象 Dataset 在訓練時預取出若干個元素,使得在GPU訓練的同時CPU可以準備資料,從而提升訓練流程的效率,如下圖所示:
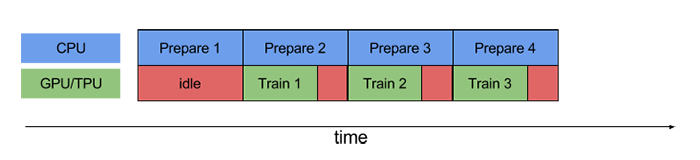
Dataset.prefetch() 的使用方法和前節的 Dataset.batch() 、 Dataset.shuffle() 等非常類似。繼續以前節的MNIST資料集為例,若希望開啟預先加載資料,使用如下程式碼即可:
mnist_dataset = mnist_dataset.prefetch(buffer_size=tf.data.experimental.AUTOTUNE)
此處參數 buffer_size 既可手工設置,也可設置為 tf.data.experimental.AUTOTUNE 從而由TensorFlow自動選擇合適的數值。
與此類似, Dataset.map() 也可以利用多GPU資源,平行化的對資料項進行變換,從而提高效率。以前節的MNIST資料集為例,假設用於訓練的電腦具有2核的CPU,我們希望充分利用多核心的優勢對資料進行平行化變換(比如前節的旋轉90度函數 rot90 ),可以使用以下程式碼:
mnist_dataset = mnist_dataset.map(map_func=rot90, num_parallel_calls=2)
其運行過程如下圖所示:
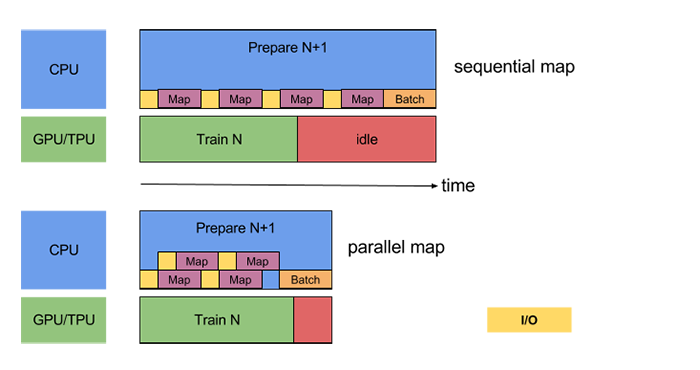
當然,這裡同樣可以將 num_parallel_calls 設置為 tf.data.experimental.AUTOTUNE 讓TensorFlow自動選擇合適的數值。
除此以外,還有很多提升資料集處理性能的方式,可參考 TensorFlow文件 進一步了解。後文的實例中展示了tf.data平行化策略的強大性能,可 點此 查看。
資料集元素的獲取與使用¶
建立資料並預處理完成後,我們需要從其中疊代獲取資料以用於訓練。tf.data.Dataset 是一個Python的可疊代對象,因此可以使用For循環疊代獲取資料,即:
dataset = tf.data.Dataset.from_tensor_slices((A, B, C, ...))
for a, b, c, ... in dataset:
# 對張量a, b, c等進行操作,例如送入模型進行訓練
也可以使用 iter() 顯式創建一個Python疊代器並使用 next() 獲取下一個元素,即:
dataset = tf.data.Dataset.from_tensor_slices((A, B, C, ...))
it = iter(dataset)
a_0, b_0, c_0, ... = next(it)
a_1, b_1, c_1, ... = next(it)
Keras支援使用 tf.data.Dataset 直接作為輸入。當呼叫 tf.keras.Model 的 fit() 和 evaluate() 方法時,可以將參數中的輸入資料 x 指定為一個元素格式為 (輸入資料, 標籤資料) 的 Dataset ,並忽略掉參數中的標籤資料 y 。例如,對於上述的MNIST資料集,常規的Keras訓練方式是:
model.fit(x=train_data, y=train_label, epochs=num_epochs, batch_size=batch_size)
使用 tf.data.Dataset 後,我們可以直接傳入 Dataset :
model.fit(mnist_dataset, epochs=num_epochs)
由於已經通過 Dataset.batch() 方法劃分了資料集的批次,所以這里也無需提供批次的大小。
實例:cats_vs_dogs圖片分類¶
以下程式碼以貓狗圖片二分類任務為範例,展示了使用 tf.data 結合 tf.io 和 tf.image 建立 tf.data.Dataset 資料集,並進行訓練和測試的完整過程。資料集可至 這裡 下載。使用前須將資料集解壓到程式碼中 data_dir 所設置的目錄(此處預設設置為 C:/datasets/cats_vs_dogs ,可根據自己的需求進行修改)。
import tensorflow as tf
import os
num_epochs = 10
batch_size = 32
learning_rate = 0.001
data_dir = 'C:/datasets/cats_vs_dogs'
train_cats_dir = data_dir + '/train/cats/'
train_dogs_dir = data_dir + '/train/dogs/'
test_cats_dir = data_dir + '/valid/cats/'
test_dogs_dir = data_dir + '/valid/dogs/'
def _decode_and_resize(filename, label):
image_string = tf.io.read_file(filename) # 讀取原始文件
image_decoded = tf.image.decode_jpeg(image_string) # 解碼JPEG圖片
image_resized = tf.image.resize(image_decoded, [256, 256]) / 255.0
return image_resized, label
if __name__ == '__main__':
# 建構訓練資料集
train_cat_filenames = tf.constant([train_cats_dir + filename for filename in os.listdir(train_cats_dir)])
train_dog_filenames = tf.constant([train_dogs_dir + filename for filename in os.listdir(train_dogs_dir)])
train_filenames = tf.concat([train_cat_filenames, train_dog_filenames], axis=-1)
train_labels = tf.concat([
tf.zeros(train_cat_filenames.shape, dtype=tf.int32),
tf.ones(train_dog_filenames.shape, dtype=tf.int32)],
axis=-1)
train_dataset = tf.data.Dataset.from_tensor_slices((train_filenames, train_labels))
train_dataset = train_dataset.map(
map_func=_decode_and_resize,
num_parallel_calls=tf.data.experimental.AUTOTUNE)
# 取出前buffer_size個資料放入buffer,並從其中隨機取樣,取樣後的資料用後續資料替換
train_dataset = train_dataset.shuffle(buffer_size=23000)
train_dataset = train_dataset.batch(batch_size)
train_dataset = train_dataset.prefetch(tf.data.experimental.AUTOTUNE)
model = tf.keras.Sequential([
tf.keras.layers.Conv2D(32, 3, activation='relu', input_shape=(256, 256, 3)),
tf.keras.layers.MaxPooling2D(),
tf.keras.layers.Conv2D(32, 5, activation='relu'),
tf.keras.layers.MaxPooling2D(),
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(64, activation='relu'),
tf.keras.layers.Dense(2, activation='softmax')
])
model.compile(
optimizer=tf.keras.optimizers.Adam(learning_rate=learning_rate),
loss=tf.keras.losses.sparse_categorical_crossentropy,
metrics=[tf.keras.metrics.sparse_categorical_accuracy]
)
model.fit(train_dataset, epochs=num_epochs)
使用以下程式碼進行測試:
# 建構測試資料集
test_cat_filenames = tf.constant([test_cats_dir + filename for filename in os.listdir(test_cats_dir)])
test_dog_filenames = tf.constant([test_dogs_dir + filename for filename in os.listdir(test_dogs_dir)])
test_filenames = tf.concat([test_cat_filenames, test_dog_filenames], axis=-1)
test_labels = tf.concat([
tf.zeros(test_cat_filenames.shape, dtype=tf.int32),
tf.ones(test_dog_filenames.shape, dtype=tf.int32)],
axis=-1)
test_dataset = tf.data.Dataset.from_tensor_slices((test_filenames, test_labels))
test_dataset = test_dataset.map(_decode_and_resize)
test_dataset = test_dataset.batch(batch_size)
print(model.metrics_names)
print(model.evaluate(test_dataset))
通過對以上範例進行性能測試,我們可以感受到 tf.data 的強大平行化性能。通過 prefetch() 的使用和在 map() 過程中加入 num_parallel_calls 參數,模型訓練的時間可縮減至原來的一半甚至更低。測試結果如下:
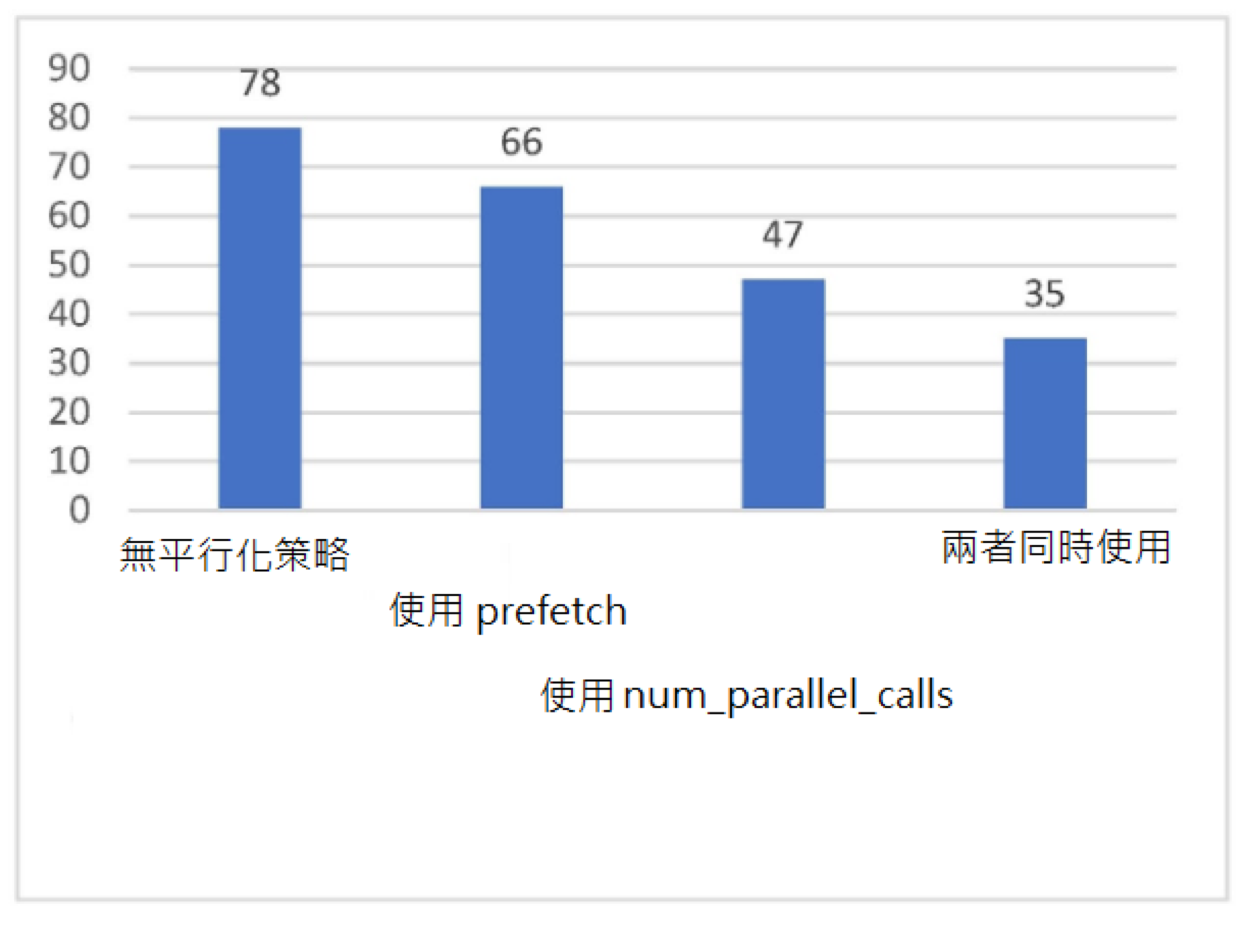
tf.data 的平行化策略性能測試(縱軸為每epoch訓練所需時間,單位:秒)¶
TFRecord :TensorFlow資料集存儲格式¶
TFRecord 是TensorFlow 中的資料集存儲格式。當我們將資料集整理成 TFRecord 格式後,TensorFlow就可以高效地讀取和處理這些資料集,從而幫助我們更高效地進行大規模的模型訓練。
TFRecord可以理解為一系列序列化的 tf.train.Example 元素所組成的列表文件,而每一個 tf.train.Example 又由若干個 tf.train.Feature 的字典組成。形式如下:
# dataset.tfrecords
[
{ # example 1 (tf.train.Example)
'feature_1': tf.train.Feature,
...
'feature_k': tf.train.Feature
},
...
{ # example N (tf.train.Example)
'feature_1': tf.train.Feature,
...
'feature_k': tf.train.Feature
}
]
為了將各種形式的資料集整理為 TFRecord 格式,我們可以對資料集中的每個元素進行以下步驟:
讀取該資料元素到內存;
將該元素轉換為
tf.train.Example對象(每一個tf.train.Example由若干個tf.train.Feature的字典組成,因此需要先建立Feature的字典);將該
tf.train.Example對象序列化為字串,並通過一個預先定義的tf.io.TFRecordWriter寫入 TFRecord 文件。
而讀取 TFRecord 資料則可按照以下步驟:
通過
tf.data.TFRecordDataset讀入原始的 TFRecord 文件(此時文件中的tf.train.Example對象尚未被反序列化),獲得一個tf.data.Dataset資料集對象;通過
Dataset.map方法,對該資料集對象中的每一個序列化的tf.train.Example字串執行tf.io.parse_single_example函數,從而實現反序列化。
以下我們通過一個實例,展示將 上一節 中使用的cats_vs_dogs二分類資料集的訓練集部分轉換為TFRecord文件,並讀取該文件的過程。
將資料集存儲為 TFRecord 文件¶
首先,與 上一節 類似,我們進行一些準備工作,下載資料集 並解壓到 data_dir ,初始化資料集的圖片文件名列表及標籤。
import tensorflow as tf
import os
data_dir = 'C:/datasets/cats_vs_dogs'
train_cats_dir = data_dir + '/train/cats/'
train_dogs_dir = data_dir + '/train/dogs/'
tfrecord_file = data_dir + '/train/train.tfrecords'
train_cat_filenames = [train_cats_dir + filename for filename in os.listdir(train_cats_dir)]
train_dog_filenames = [train_dogs_dir + filename for filename in os.listdir(train_dogs_dir)]
train_filenames = train_cat_filenames + train_dog_filenames
train_labels = [0] * len(train_cat_filenames) + [1] * len(train_dog_filenames) # 將 cat 類的標籤設為0,dog 類的標籤設為1
然後,通過以下程式碼,疊代讀取每張圖片,建立 tf.train.Feature 字典和 tf.train.Example 對象,序列化並寫入TFRecord文件。
with tf.io.TFRecordWriter(tfrecord_file) as writer:
for filename, label in zip(train_filenames, train_labels):
image = open(filename, 'rb').read() # 讀取資料集圖片到內存,image 為一個
feature = { # 建立 tf.train.Feature 字典
'image': tf.train.Feature(bytes_list=tf.train.BytesList(value=[image])), # 圖片是一個 Bytes 對象
'label': tf.train.Feature(int64_list=tf.train.Int64List(value=[label])) # 標籤是一個 Int 對象
}
example = tf.train.Example(features=tf.train.Features(feature=feature)) # 通過字典建立 Example
writer.write(example.SerializeToString()) # 將Example序列化並寫入 TFRecord 文件
值得注意的是, tf.train.Feature 支持三種資料格式:
tf.train.BytesList:字元串或原始Byte文件(如圖片),通過bytes_list參數傳入一個由字串數組初始化的tf.train.BytesList對象;tf.train.FloatList:浮點數,通過float_list參數傳入一個由浮點數陣列初始化的tf.train.FloatList對象;tf.train.Int64List:整數,通過int64_list參數傳入一個由整數陣列初始化的tf.train.Int64List對象。
如果只希望保存一個元素而非陣列,傳入一個只有一個元素的陣列即可。
運行以上程式碼,不出片刻,我們即可在 tfrecord_file 所指向的文件地址獲得一個 500MB 左右的 train.tfrecords 文件。
讀取 TFRecord 文件¶
我們可以通過以下程式碼,讀取之前建立的 train.tfrecords 文件,並通過 Dataset.map 方法,使用 tf.io.parse_single_example 函數對資料集中的每一個序列化的 tf.train.Example 對象解碼。
raw_dataset = tf.data.TFRecordDataset(tfrecord_file) # 讀取 TFRecord 文件
feature_description = { # 定義Feature結構,告訴解碼器每個Feature的類型是什麼
'image': tf.io.FixedLenFeature([], tf.string),
'label': tf.io.FixedLenFeature([], tf.int64),
}
def _parse_example(example_string): # 將 TFRecord 文件中的每一個序列化的 tf.train.Example 解碼
feature_dict = tf.io.parse_single_example(example_string, feature_description)
feature_dict['image'] = tf.io.decode_jpeg(feature_dict['image']) # 解碼JPEG圖片
return feature_dict['image'], feature_dict['label']
dataset = raw_dataset.map(_parse_example)
這裡的 feature_description 類似於一個資料集的“描述文件”,通過一個由鍵值對組成的字典,告知 tf.io.parse_single_example 函數每個 tf.train.Example 資料項有哪些Feature,以及這些Feature的類型、形狀等屬性。 tf.io.FixedLenFeature 的三個輸入參數 shape 、 dtype 和 default_value (可省略)為每個Feature的形狀、類型和預設值。這裡我們的資料項都是單個的數值或者字元串,所以 shape 為空陣列。
運行以上程式碼後,我們獲得一個資料集對象 dataset ,這已經是一個可以用於訓練的 tf.data.Dataset 對象了!我們從該資料集中讀取元素並輸出驗證:
import matplotlib.pyplot as plt
for image, label in dataset:
plt.title('cat' if label == 0 else 'dog')
plt.imshow(image.numpy())
plt.show()
顯示:
可見圖片和標籤都正確顯示,資料集建構成功。
tf.function :圖執行模式 *¶
雖然預設的即時執行模式(Eager Execution)為我們帶來了靈活及容易偵錯的特性,但在特定的場合,例如追求高性能或部署模型時,我們依然希望使用 TensorFlow 1.X 中預設的圖執行模式(Graph Execution),將模型轉換為高效的 TensorFlow 圖模型。此時,TensorFlow 2 為我們提供了 tf.function 模組,結合 AutoGraph 機制,使得我們僅需加入一個簡單的 @tf.function 修飾符,就能輕鬆將模型以圖執行模式運行。
tf.function 基礎使用方法¶
在 TensorFlow 2 中,推薦使用 tf.function (而非1.X中的 tf.Session )實現圖執行模式,從而將模型轉換為易於部署且高性能的TensorFlow圖模型。只需要將我們希望以圖執行模式運行的代碼封裝在一個函數內,並在函數前加上 @tf.function 即可,如下例所示。關於圖執行模式的深入探討可參考 附錄 。
警告
並不是任何函數都可以被 @tf.function 修飾!@tf.function 使用靜態編譯將函數內的程式碼轉換成計算圖,因此對函數內可使用的語句有一定限制(僅支援Python語言的一個子集),且需要函數內的操作本身能夠被建構為計算圖。建議在函數內只使用TensorFlow的原生操作,不要使用過於複雜的Python語句,函數參數只包括TensorFlow張量或NumPy陣列,並最好是能夠按照計算圖的思想去建構函數(換言之,@tf.function 只是給了你一種更方便的寫計算圖的方法,而不是一顆能給任何函數加速的 銀子彈 )。詳細內容可參考 AutoGraph Capabilities and Limitations 。建議配合 附錄 一同閱讀本節以獲得較深入的理解。
import tensorflow as tf
import time
from zh.model.mnist.cnn import CNN
from zh.model.utils import MNISTLoader
num_batches = 1000
batch_size = 50
learning_rate = 0.001
data_loader = MNISTLoader()
model = CNN()
optimizer = tf.keras.optimizers.Adam(learning_rate=learning_rate)
@tf.function
def train_one_step(X, y):
with tf.GradientTape() as tape:
y_pred = model(X)
loss = tf.keras.losses.sparse_categorical_crossentropy(y_true=y, y_pred=y_pred)
loss = tf.reduce_mean(loss)
# 注意這裡使用了TensorFlow內建的tf.print()。@tf.function不支援Python內建的print方法
tf.print("loss", loss)
grads = tape.gradient(loss, model.variables)
optimizer.apply_gradients(grads_and_vars=zip(grads, model.variables))
start_time = time.time()
for batch_index in range(num_batches):
X, y = data_loader.get_batch(batch_size)
train_one_step(X, y)
end_time = time.time()
print(end_time - start_time)
運行400個Batch進行測試,加入 @tf.function 的程式耗時35.5秒,未加入 @tf.function 的純即時執行模式程式耗時43.8秒。可見 @tf.function 帶來了一定的性能提升。一般而言,當模型由較多小的操作組成的時候, @tf.function 帶來的提升效果較大。而當模型的操作數量較少,但單一操作均很耗時的時候,則 @tf.function 帶來的性能提升不會太大。
tf.function 內在機制¶
當被 @tf.function 修飾的函數第一次被呼叫的時候,進行以下操作:
在即時執行模式關閉的環境下,函數內的程式碼依次運行。也就是說,每個
tf.方法都只是定義了計算節點,而並沒有進行任何實質的計算。這與TensorFlow 1.X的圖執行模式是一致的;使用AutoGraph將函數中的Python控制語句轉換成TensorFlow計算圖中的對應節點(比如說
while和for語句轉換為tf.while,if語句轉換為tf.cond等等;基於上面的兩步,建立函數內程式碼的計算圖表示(為了保證圖的計算順序,圖中還會自動加入一些
tf.control_dependencies節點);運行一次這個計算圖;
基於函數的名字和輸入的函數參數的類型生成一個雜湊值,並將建立的計算圖緩衝區到一個雜湊表中。
在被 @tf.function 修飾的函數之後再次被呼叫的時候,根據函數名和輸入的函數參數的類型計算雜湊值,檢查雜湊表中是否已經有了對應計算圖的緩衝區。如果是,則直接使用已緩衝區的計算圖,否則重新按上述步驟建立計算圖。
提示
對於熟悉 TensorFlow 1.X 的開發者,如果想要直接獲得 tf.function 所生成的計算圖以進行進一步處理和應用,可以使用被修飾函數的 get_concrete_function 方法。該方法接受的參數與被修飾函數相同。例如,為了獲得前節被 @tf.function 修飾的函數 train_one_step 所生成的計算圖,可以使用以下程式碼:
graph = train_one_step.get_concrete_function(X, y)
其中 graph 即為一個 tf.Graph 對象。
以下是一個測試題:
import tensorflow as tf
import numpy as np
@tf.function
def f(x):
print("The function is running in Python")
tf.print(x)
a = tf.constant(1, dtype=tf.int32)
f(a)
b = tf.constant(2, dtype=tf.int32)
f(b)
b_ = np.array(2, dtype=np.int32)
f(b_)
c = tf.constant(0.1, dtype=tf.float32)
f(c)
d = tf.constant(0.2, dtype=tf.float32)
f(d)
思考一下,上面這段程式的結果是什麼?
答案是:
The function is running in Python
1
2
2
The function is running in Python
0.1
0.2
當計算 f(a) 時,由於是第一次呼叫該函數,TensorFlow進行了以下操作:
將函數內的程式碼依次運行了一遍(因此輸出了文件);
構建了計算圖,然後運行了一次該計算圖(因此輸出了1)。這里
tf.print(x)可以作為計算圖的節點,但Python內建的print則不能被轉換成計算圖的節點。因此,計算圖中只包含了tf.print(x)這一操作;將該計算圖緩衝區到了一個雜湊表中(如果之後再有類型為
tf.int32,shape為空的張量輸入,則重復使用已建構的計算圖)。
計算 f(b) 時,由於b的類型與a相同,所以TensorFlow重復使用了之前已建構的計算圖並運行(因此輸出了2)。這裡由於並沒有真正地逐行運行函數中的程式碼,所以函數第一行的文本輸出程式碼沒有運行。計算 f(b_) 時,TensorFlow自動將numpy的資料結構轉換成了TensorFlow中的張量,因此依然能夠複用之前已建構的計算圖。
計算 f(c) 時,雖然張量 c 的shape和 a 、 b 均相同,但類型為 tf.float32 ,因此TensorFlow重新運行了函數內程式碼(從而再次輸出了文本)並建立了一個輸入為 tf.float32 類型的計算圖。
計算 f(d) 時,由於 d 和 c 的類型相同,所以TensorFlow複用了計算圖,同理沒有輸出文本。
而對於 @tf.function 對Python內建的整數和浮點數類型的處理方式,我們通過以下範例展現:
f(d)
f(1)
f(2)
f(1)
f(0.1)
f(0.2)
f(0.1)
結果為:
The function is running in Python
1
The function is running in Python
2
1
The function is running in Python
0.1
The function is running in Python
0.2
0.1
簡單來說,對於Python內建的整數和浮點數類型,只有當值完全一致的時候, @tf.function 才會複用之前建立的計算圖,而並不會自動將Python內建的整數或浮點數等轉換成張量。因此,當函數參數包含Python內建整數或浮點數時,需要格外小心。一般而言,應當只在指定超參數等少數場合使用Python內建類型作為被 @tf.function 修飾的函數的參數。
下一個思考題:
import tensorflow as tf
a = tf.Variable(0.0)
@tf.function
def g():
a.assign(a + 1.0)
return a
print(g())
print(g())
print(g())
這段程式碼的輸出是:
tf.Tensor(1.0, shape=(), dtype=float32)
tf.Tensor(2.0, shape=(), dtype=float32)
tf.Tensor(3.0, shape=(), dtype=float32)
正如同本文的例子一樣,你可以在被 @tf.function 修飾的函數裡呼叫 tf.Variable 、 tf.keras.optimizers 、 tf.keras.Model 等包含有變數的資料結構。一旦被呼叫,這些結構將作為隱含的參數提供給函數。當這些結構內的值在函數內被修改時,在函數外也同樣生效。
AutoGraph:將Python控制流轉換為TensorFlow計算圖¶
前面提到,@tf.function 使用名為AutoGraph的機制將函數中的Python控制流語句轉換成TensorFlow計算圖中的對應節點。以下是一個範例,使用 tf.autograph 模組的低層API tf.autograph.to_code 將函數 square_if_positive 轉換成TensorFlow計算圖:
import tensorflow as tf
@tf.function
def square_if_positive(x):
if x > 0:
x = x * x
else:
x = 0
return x
a = tf.constant(1)
b = tf.constant(-1)
print(square_if_positive(a), square_if_positive(b))
print(tf.autograph.to_code(square_if_positive.python_function))
輸出:
tf.Tensor(1, shape=(), dtype=int32) tf.Tensor(0, shape=(), dtype=int32)
def tf__square_if_positive(x):
do_return = False
retval_ = ag__.UndefinedReturnValue()
cond = x > 0
def get_state():
return ()
def set_state(_):
pass
def if_true():
x_1, = x,
x_1 = x_1 * x_1
return x_1
def if_false():
x = 0
return x
x = ag__.if_stmt(cond, if_true, if_false, get_state, set_state)
do_return = True
retval_ = x
cond_1 = ag__.is_undefined_return(retval_)
def get_state_1():
return ()
def set_state_1(_):
pass
def if_true_1():
retval_ = None
return retval_
def if_false_1():
return retval_
retval_ = ag__.if_stmt(cond_1, if_true_1, if_false_1, get_state_1, set_state_1)
return retval_
我們注意到,原函數中的Python控制流 if...else... 被轉換為了 x = ag__.if_stmt(cond, if_true, if_false, get_state, set_state) 這種計算圖式的寫法。AutoGraph起到了類似編譯器的作用,能夠幫助我們通過更加自然的Python控制流輕鬆地建構帶有條件/循環的計算圖,而無需手動使用TensorFlow的API進行建構。
使用傳統的 tf.Session¶
不過,如果你依然鍾情於TensorFlow傳統的圖執行模式也沒有問題。TensorFlow 2 提供了 tf.compat.v1 模組以支持TensorFlow 1.X版本的API。同時,只要在編寫模型的時候稍加注意,Keras的模型是可以同時兼容即時執行模式和圖執行模式的。注意,在圖執行模式下, model(input_tensor) 只需運行一次以完成圖的建立操作。
例如,通過以下程式碼,同樣可以在MNIST資料集上訓練前面所建立的MLP或CNN模型:
optimizer = tf.compat.v1.train.AdamOptimizer(learning_rate=learning_rate)
num_batches = int(data_loader.num_train_data // batch_size * num_epochs)
# 建立計算圖
X_placeholder = tf.compat.v1.placeholder(name='X', shape=[None, 28, 28, 1], dtype=tf.float32)
y_placeholder = tf.compat.v1.placeholder(name='y', shape=[None], dtype=tf.int32)
y_pred = model(X_placeholder)
loss = tf.keras.losses.sparse_categorical_crossentropy(y_true=y_placeholder, y_pred=y_pred)
loss = tf.reduce_mean(loss)
train_op = optimizer.minimize(loss)
sparse_categorical_accuracy = tf.keras.metrics.SparseCategoricalAccuracy()
# 建立Session
with tf.compat.v1.Session() as sess:
sess.run(tf.compat.v1.global_variables_initializer())
for batch_index in range(num_batches):
X, y = data_loader.get_batch(batch_size)
# 使用Session.run()將資料送入計算圖節點,進行訓練以及計算損失函數
_, loss_value = sess.run([train_op, loss], feed_dict={X_placeholder: X, y_placeholder: y})
print("batch %d: loss %f" % (batch_index, loss_value))
num_batches = int(data_loader.num_test_data // batch_size)
for batch_index in range(num_batches):
start_index, end_index = batch_index * batch_size, (batch_index + 1) * batch_size
y_pred = model.predict(data_loader.test_data[start_index: end_index])
sess.run(sparse_categorical_accuracy.update(y_true=data_loader.test_label[start_index: end_index], y_pred=y_pred))
print("test accuracy: %f" % sess.run(sparse_categorical_accuracy.result()))
關於圖執行模式的更多內容可參見 圖執行模式下的 TensorFlow 2。
tf.TensorArray :TensorFlow 動態陣列 *¶
在部分網路結構,尤其是涉及到時間序列的結構中,我們可能需要將一系列張量以陣列的方式依次存放起來,以供進一步處理。當然,在即時執行模式下,你可以直接使用一個Python列表(List)存放陣列。不過,如果你需要基於計算圖的特性(例如使用 @tf.function 加速模型運行或者使用SavedModel匯出模型),就無法使用這種方式了。因此,TensorFlow提供了 tf.TensorArray ,一種支持計算圖特性的TensorFlow動態陣列。
其宣告的方式為:
arr = tf.TensorArray(dtype, size, dynamic_size=False):宣告一個大小為size,類型為dtype的TensorArrayarr。如果將dynamic_size參數設置為True,則該陣列會自動增長空間。
其讀取和寫入的方法為:
write(index, value):將value寫入陣列的第index個位置;read(index):讀取陣列的第index個值;
除此以外,TensorArray還包括 stack() 、 unstack() 等常用操作,可參考 文件 以了解詳情。
請注意,由於需要支持計算圖, tf.TensorArray 的 write() 方法是不可以忽略儲存變數的!也就是說,在圖執行模式下,必須按照以下的形式寫入陣列:
arr = arr.write(index, value)
這樣才可以正常生成一個計算圖操作,並將該操作返回給 arr 。而不可以寫成:
arr.write(index, value) # 生成的計算圖操作沒有變數接收,從而丟失
一個簡單的範例如下:
import tensorflow as tf
@tf.function
def array_write_and_read():
arr = tf.TensorArray(dtype=tf.float32, size=3)
arr = arr.write(0, tf.constant(0.0))
arr = arr.write(1, tf.constant(1.0))
arr = arr.write(2, tf.constant(2.0))
arr_0 = arr.read(0)
arr_1 = arr.read(1)
arr_2 = arr.read(2)
return arr_0, arr_1, arr_2
a, b, c = array_write_and_read()
print(a, b, c)
輸出:
tf.Tensor(0.0, shape=(), dtype=float32) tf.Tensor(1.0, shape=(), dtype=float32) tf.Tensor(2.0, shape=(), dtype=float32)
tf.config:GPU的使用與分配 *¶
指定當前程式使用的GPU¶
很多時候的情況是:實驗室/公司研究組裡有許多學生/研究員需要共同使用一台多GPU的工作站,而預設情況下TensorFlow會使用其所能夠使用的所有GPU,這時就需要合理分配顯卡資源。
首先,通過 tf.config.list_physical_devices ,我們可以獲得當前主機上某種特定運算設備類型(如 GPU 或 CPU )的列表,例如,在一台具有4塊GPU和一個CPU的工作站上運行以下程式碼:
gpus = tf.config.list_physical_devices(device_type='GPU')
cpus = tf.config.list_physical_devices(device_type='CPU')
print(gpus, cpus)
輸出:
[PhysicalDevice(name='/physical_device:GPU:0', device_type='GPU'),
PhysicalDevice(name='/physical_device:GPU:1', device_type='GPU'),
PhysicalDevice(name='/physical_device:GPU:2', device_type='GPU'),
PhysicalDevice(name='/physical_device:GPU:3', device_type='GPU')]
[PhysicalDevice(name='/physical_device:CPU:0', device_type='CPU')]
可見,該工作站具有4塊GPU:GPU:0 、 GPU:1 、 GPU:2 、 GPU:3 ,以及一個CPU CPU:0 。
然後,通過 tf.config.set_visible_devices ,可以設置當前程式可見的設備範圍(當前程式只會使用自己可見的設備,不可見的設備不會被當前程式使用)。例如,如果在上述4卡的機器中我們需要限定當前程式只使用代號為0、1的兩塊顯卡(GPU:0 和 GPU:1),可以使用以下程式碼:
gpus = tf.config.list_physical_devices(device_type='GPU')
tf.config.set_visible_devices(devices=gpus[0:2], device_type='GPU')
小技巧
使用環境變數 CUDA_VISIBLE_DEVICES 也可以控制程式所使用的GPU。假設發現四卡的機器上顯卡0,1使用中,顯卡2,3閒置,Linux終端輸入:
export CUDA_VISIBLE_DEVICES=2,3
或在程式碼中加入
import os
os.environ['CUDA_VISIBLE_DEVICES'] = "2,3"
即可指定程式只在顯卡2,3上運行。
設置顯示卡記憶體儲存空間使用策略¶
預設情況下,TensorFlow將使用幾乎所有可用的顯示卡記憶體空間,以避免內存碎片化所帶來的性能損失。不過,TensorFlow提供兩種顯示卡記憶體儲存空間使用策略,讓我們能夠更靈活地控制程式的顯示卡記憶體儲存使用方式:
僅在需要時申請顯示卡記憶體儲存空間(程式初始運行時消耗很少的顯示卡儲存空間,隨著程式的運行而動態申請顯示卡記憶體儲存空間);
限制消耗固定大小的顯示卡記憶體儲存空間(程式不會超出限定的顯示卡記憶體儲存大小,若超出的報錯)。
可以通過 tf.config.experimental.set_memory_growth 將GPU的顯示卡記憶體儲存使用策略設置為“僅在需要時申請顯示卡記憶體儲存空間”。以下程式碼將所有GPU設置為僅在需要時申請記憶體儲存空間:
gpus = tf.config.list_physical_devices(device_type='GPU')
for gpu in gpus:
tf.config.experimental.set_memory_growth(device=gpu, enable=True)
以下程式碼通過 tf.config.set_logical_device_configuration 選項並傳入 tf.config.LogicalDeviceConfiguration 實例,設置TensorFlow固定消耗 GPU:0 的1GB顯示卡記憶體儲存空間(其實可以理解為建立了一個顯示卡記憶體儲存大小為1GB的“虛擬GPU”):
gpus = tf.config.list_physical_devices(device_type='GPU')
tf.config.set_logical_device_configuration(
gpus[0],
[tf.config.LogicalDeviceConfiguration(memory_limit=1024)])
提示
TensorFlow 1.X 的 圖執行模式 下,可以在實例化新的session時傳入 tf.compat.v1.ConfigPhoto 類別來設置TensorFlow使用顯示卡記憶體儲存的策略。具體方式是實例化一個 tf.ConfigProto 類別,設置參數,並在創建 tf.compat.v1.Session 時指定Config參數。以下程式碼通過 allow_growth 選項設置TensorFlow僅在需要時申請顯示卡記憶體儲存空間:
config = tf.compat.v1.ConfigProto()
config.gpu_options.allow_growth = True
sess = tf.compat.v1.Session(config=config)
以下程式碼通過 per_process_gpu_memory_fraction 選項設置TensorFlow固定消耗40%的GPU顯示卡記憶體儲存空間:
config = tf.compat.v1.ConfigProto()
config.gpu_options.per_process_gpu_memory_fraction = 0.4
tf.compat.v1.Session(config=config)
單GPU模擬多GPU環境¶
當我們的本地開發環境只有一個GPU,但卻需要編寫多GPU的程式在工作站上進行訓練任務時,TensorFlow為我們提供了一個方便的功能,可以讓我們在本地開發環境中建立多個模擬GPU,從而讓多GPU的程式使用變得更加方便。以下程式碼在實體GPU GPU:0 的基礎上建立了兩個顯示卡均為2GB的虛擬GPU。
gpus = tf.config.list_physical_devices('GPU')
tf.config.set_logical_device_configuration(
gpus[0],
[tf.config.LogicalDeviceConfiguration(memory_limit=2048),
tf.config.LogicalDeviceConfiguration(memory_limit=2048)])
我們在 單機多卡訓練 的程式碼前加入以上代碼,即可讓原本為多GPU設計的程式碼在單GPU環境下運行。當輸出設備數量時,程式會輸出:
Number of devices: 2